






移動機器人底盤輪轂電機產(chǎn)品參數(shù)介紹
移動機器人地盤輪廓電機是一種應用在智能移動機器人底盤上的驅(qū)動電機齒輪箱,主要驅(qū)動結構由驅(qū)動電機、減速齒輪箱組裝而成,驅(qū)動電機可采用直流有刷電機、直流無刷電機、步進電機、空心杯電機作為驅(qū)動電機,齒輪箱是一種具備減速、提升扭矩功能,可采用行星齒輪箱、蝸輪蝸桿齒輪箱、平行齒輪箱作為減速器;移動機器人地盤輪廓電機的技術參數(shù)是定制開發(fā)而成,例如驅(qū)動電機類型,輸出轉速,功率,電壓,電流,直徑規(guī)格,齒輪箱減速比、輸出轉速、驅(qū)動噪音、輸出扭矩、齒輪箱回程間隙精度等參數(shù)是按照需求定制開發(fā)而成的;兆威機電股份有限公司致力于研發(fā)、設計、制造移動機器人底盤輪廓電機齒輪箱產(chǎn)品,廣泛應用在智能行走機器人、服務機器人、野外科研機器人、醫(yī)療機器人、消毒機器人的驅(qū)動電機齒輪箱模塊上。
移動機器人底盤輪轂電機參數(shù):參數(shù)范圍在直徑3.4mm-38mm,功率:0.01-40W,輸出轉速5-2000rpm,電壓3V-24V,齒輪箱回程間隙1-2弧分,驅(qū)動噪音45DB,減速比5-1500,輸出扭矩1gf.cm到50Kgf.cm,適用環(huán)境溫度范圍-30……+100℃,電機可采用直流有刷電機、直流無刷電機、步進電機、空心杯電機;減速器可采用行星減速齒輪箱、非標定制齒輪箱、舵機齒輪箱、蝸輪蝸桿齒輪箱。
定制開發(fā)服務案例:
項目名稱:智能機器人輪式行走齒輪箱
項目背景:協(xié)助AGV控制系統(tǒng)的完成(控制系統(tǒng)包括:地面(上位)控制系統(tǒng)及車載(下位)控制系統(tǒng)),其中,地面控制系統(tǒng)指 AGV系統(tǒng)的固定設備,主要負責任務分配,車輛調(diào)度,路徑(線)管理,交通管理,自動充電等功能;車載控制系統(tǒng)在收到上位系統(tǒng)的指令后,負責AGV的導航計算,導引提升,車輛行走,裝卸操作等功能。
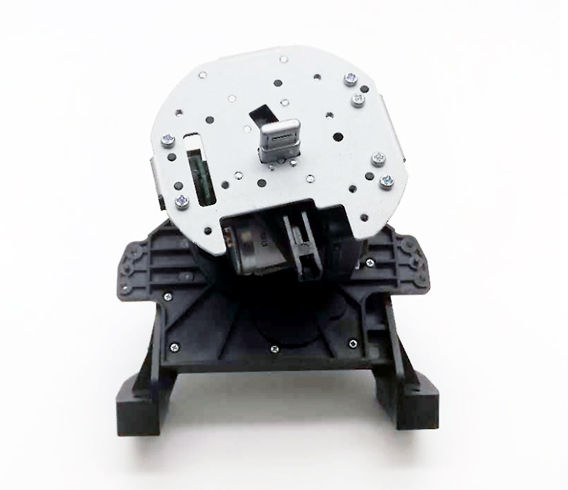
產(chǎn)品介紹:機器人輪式行走驅(qū)動部分采用直流電 機和38mm行星齒輪箱組合,反對稱安 裝方式。這種方式可以在使輪對同軸, 提供較大動力 (通常電機外形尺寸和 功率成一定比例)的情況下,減輕減速 機輸出軸受力點,大大縮短輪距,節(jié)約 空間,以使機器人體積小型化。兩個驅(qū)動電機分別控制左后驅(qū)動輪和右后驅(qū)動輪,使機器人能夠更好的完成轉向任務,同時在裝置上安裝了超 聲測距傳感器和紅外避障傳感器,使得機器人在行走時能夠發(fā)現(xiàn)前方的障礙物,提前轉向躲避,解決輪式移動機 器人的拐彎躲避障礙物能力差的問題。

兆威機電股份有限公司致力于研發(fā)、設計、制造智能機器人電機齒輪箱產(chǎn)品,廣泛應用在智能機器人、教育機器人、物流機器人、醫(yī)療機器人、消毒機器人等智能機器人上的驅(qū)動電機齒輪箱系統(tǒng)。
療胰島素注射筆驅(qū)動系統(tǒng)應用")