






步進電機如何減速?
步進電機是一種常用、應(yīng)用廣泛的驅(qū)動電機,步進電機通常需要搭配減速設(shè)備一起使用,以達到理想驅(qū)動效果;步進電機常用的減速設(shè)備和方法有如減速齒輪箱、編碼器、控制器、脈沖信號等。
脈沖信號減速:步進電機轉(zhuǎn)速度,是根據(jù)輸入的脈沖信號的變化來改變的。從理論上講,給驅(qū)動器一個脈沖,步進電機就旋轉(zhuǎn)一個步距角(細分時為一個細分步距角)。實際上,如果脈沖信號變化太快,步進電機由于內(nèi)部的反向電動勢的阻尼作用,轉(zhuǎn)子與定子之間的磁反應(yīng)將跟隨不上電信號的變化,將導致堵轉(zhuǎn)和丟步。
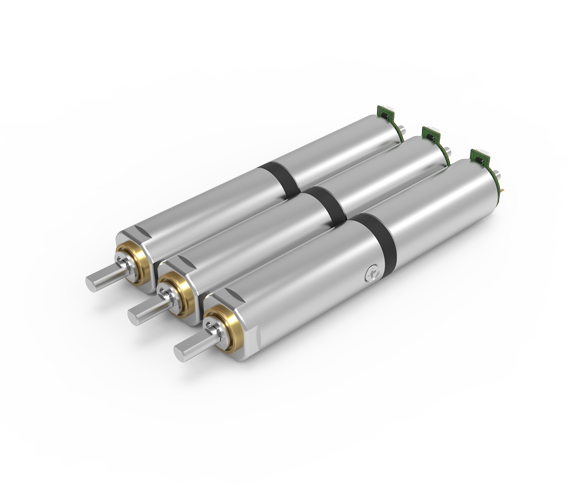
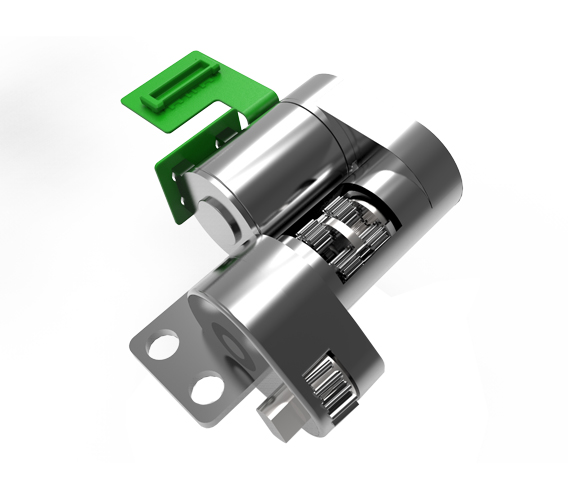
減速齒輪箱減速:步進電機搭載減速齒輪箱一起使用,步進電機輸出高速、低扭矩轉(zhuǎn)速,連接減速齒輪箱,齒輪箱內(nèi)部減速齒輪組嚙合驅(qū)動形成的減速比,將步進電機輸出的高速降低,而且提升驅(qū)動扭矩,達到理想驅(qū)動效果;減速效果取決于齒輪箱的減速驅(qū)動比,減速比越大,輸出轉(zhuǎn)速越小,反之亦然。
曲線指數(shù)控制速度:指數(shù)曲線,在軟件編程中,先算好時間常數(shù)存貯在計算機存貯器內(nèi),工作時指向選取。通常,完成步進電機的加減速時間為300ms以上。如果使用過于短的加減速時間,對絕大多數(shù)步進電機來說,就會難以提升步進電機的高速旋轉(zhuǎn)。
編碼器控制減速:PID 控制作為一種簡單而實用的控制方法 , 在步進電機驅(qū)動中獲得了廣泛的應(yīng)用。它根據(jù)給定值 r( t) 與實際輸出值 c(t) 構(gòu)成控制偏差 e( t) , 將偏差的比例 、積分和微分通過線性組合構(gòu)成控制量 ,對被控對象進行控制 。文獻將集成位置傳感器用于二相混合式步進電機中 ,以位置檢測器和矢量控制為基礎(chǔ) ,設(shè)計出了一個可自動調(diào)節(jié)的 PI 速度控制器 ,此控制器在變工況的條件下能提供令人滿意的瞬態(tài)特性 。文獻根據(jù)步進電機的數(shù)學模型 ,設(shè)計了步進電機的 PID 控制系統(tǒng) ,采用 PID 控制算法得到控制量 ,從而控制電機向指定位置運動 。最后 ,通過仿真驗證了該控制具有較好的動態(tài)響應(yīng)特性 。采用 PID 控制器具有結(jié)構(gòu)簡單 、魯棒性強 、可靠性高等優(yōu)點 ,但是它無法有效應(yīng)對系統(tǒng)中的不確定信息 。
療胰島素注射筆驅(qū)動系統(tǒng)應(yīng)用")